- Table of Contents
- 1. Model - f14
- 1.1. Systems
- 1.2. Blocks
- 1.3. Data and Functions
- 1.4. Signals
- 1.5. Scopes
- List of Tables
- 1-1. Block Type Count
- 1-2. Model Functions
- 1-3. Model Variables
- List of Figures
- 1-1. Angle of Attack
- 1-2. Pilot G force Scope
- 1-3. Stick Input
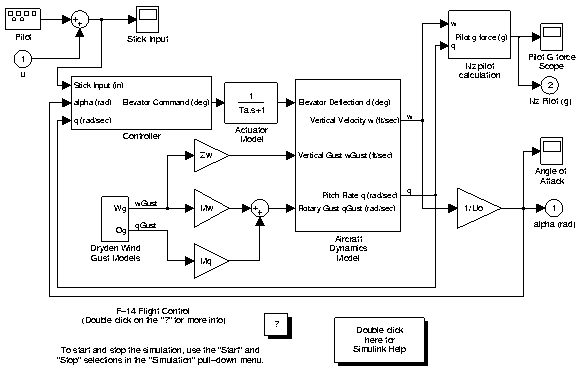
Chapter 1. Model - f14
| Solver ode45 | ZeroCross on | StartTime 0.0 StopTime 60 |
| RelTol 1e-4 | AbsTol 1e-6 | Refine 1 |
| InitialStep auto | FixedStep auto | MaxStep auto |
| NumModelInputs | 1 | NumModelOutputs | 2 |
| NumVirtualSubsystems | 5 | NumNonvirtSubsystems | 0 |
| NumNonVirtBlocksInModel | 42 | NumBlockTypeCounts | 10 |
| NumBlockSignals | 22 | NumBlockParams | 41 |
| NumZCEvents | 0 | NumNonsampledZCs | 0 |
1.1. Systems
| Name | Blocks | Description |
|---|---|---|
| Aircraft Dynamics Model |
Elevator Deflection d (deg) | |
| Controller |
Stick Input (in) | |
| Dryden Wind Gust Models |
Band-Limited White Noise | |
| f14 |
u | |
| More Info | ||
| More Info1 | ||
| Nz pilot calculation |
w |
1.2. Blocks
1.3. Data and Functions
Table 1-2. Model Functions
| Function Name | Parent Blocks | Calling string |
|---|---|---|
| pi |
|
pi/(4*b)*[1 0] |
| sqrt | W-gust model | Swg/sqrt(a^3)*[sqrt(3)*a,1] |
Table 1-3. Model Variables
| Variable Name | Parent Blocks | Calling string | Value |
|---|---|---|---|
| Ka | Gain3 | Ka | 0.677 |
| Kf | Gain | Kf | -1.746 |
| Ki | Proportional plus integral compensator | [Ki] | -3.864 |
| Kq | Gain2 | Kq | 0.8156 |
| Md | Gain6 | Md | -6.8847 |
| Mq |
|
[1,-Mq] | -0.6571 |
| Mw |
|
Mw | -0.00592 |
| Swg | W-gust model | Swg/sqrt(a^3)*[sqrt(3)*a,1] | 3 |
| Ta | Actuator Model | [ Ta, 1] | 0.05 |
| Tal | Alpha-sensor Low-pass Filter | [Tal,1] | 0.3959 |
| Ts | Stick Prefilter | [Ts,1] | 0.1 |
| Uo |
|
Uo | 689.4 |
| Vto | Q-gust model | [1 pi*Vto/(4*b)] | 690.4 |
| W1 | Pitch Rate Lead Filter | [1,W1] | 2.971 |
| W2 | Pitch Rate Lead Filter | [1,W2] | 4.144 |
| Zd | Gain5 | Zd | -63.9979 |
| Zw |
|
[1,-Zw] | -0.6385 |
| a |
|
Swg/sqrt(a^3)*[sqrt(3)*a,1] | 2.5348 |
| b |
|
pi/(4*b)*[1 0] | 64.13 |
| g | Gain2 | 1/g | 32.2 |